Parallel Kinematics

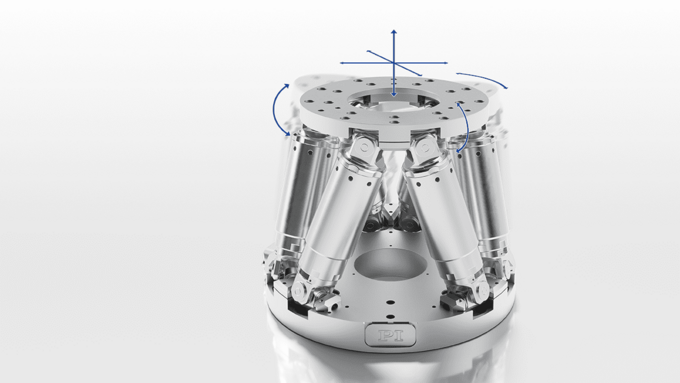
In a parallel-kinematic, multi-axis system, all actuators act directly on a single moving platform. This means that all axes can be designed with identical dynamic properties, thus reducing the moved mass considerably. Hexapods are used for moving and precision positioning, aligning and displacing loads in all six degrees of freedom, i.e., three linear and three rotational axes.