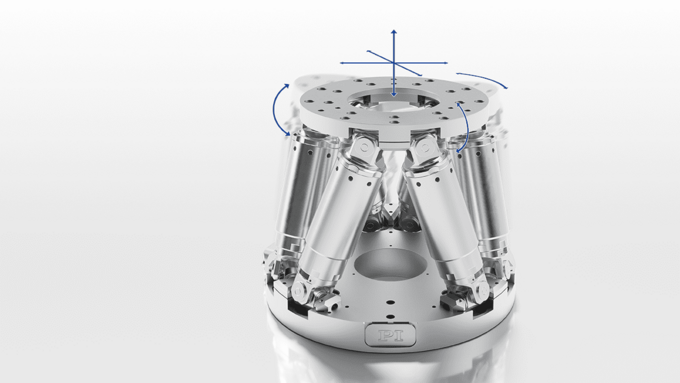
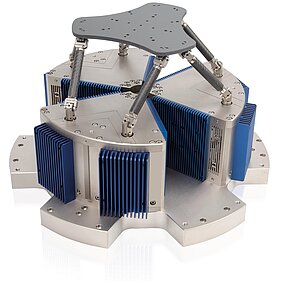
A hexapod is a parallel-kinematic motion platform, that moves, positions, and aligns loads in six degrees of freedom: three translational axes (X, Y, Z) and three rotational axes (ΘX, ΘY, ΘZ). The typical structure of a hexapod, also known as Stewart platform, consists of six length-adjustable actuators connected via joints to the base plate as well as a motion platform that carries the load. Thanks to their parallel-kinematic design, hexapods can execute complex multi-axis motion profiles with high repeatability, dynamics, and stability. At the same time, they are very compact.
PI’s precision hexapods are based on more than three decades of design and manufacturing experience. The broad range of drive technologies, from piezoelectric to electromagnetic, enables PI to offer hexapods for a wide range of specification requirements and installation situations, when combined with the appropriate sensors, software, and motion control.

Thanks to powerful, intuitive controllers and software, the hexapods are easy to control. The user-definable center of rotation also provides maximum application flexibility.
PI hexapods are available in different sizes and configurations and cover a variety of applications, from hexapods for sample positioning in experiments to active alignment of optical fibers and elements to automated assembly.
Discover our wide range of precision hexapods for loads from 1 kg to 250 kg in the standard version and repeatability to ±0.06 µm. Customized precision hexapods can even carry loads of more than 2,000 kg.


PI's high-precision miniature hexapods offer a perfect balance between size, payload, and performance. These ultra-compact hexapods are ideal for applications such as the positioning of tools or workpieces in micro-assembly, the alignment of optical fibers in silicon photonics, or the simulation of motions for functional tests. Vacuum versions down to 10-6 hPa are also available.







PI’s medium-sized precision hexapods are available in a wide range of variants for the most diverse application requirements: from dynamic hexapods for motion simulation to systems with maximum repeatability for precise alignment to hexapods with folded drivetrains in a compact design that can position medium loads.






PI’s high-load hexapods position heavy loads safely and accurately, regardless of orientation or installation situation. This is made possible by special universal joints with Z-offset and other backlash-free, rigid components. Possible applications range from moving heavy components and optics to positioning inspection tools in industry and research to aligning reflectors in telescopes.



PI has many years of experience in vacuum technology and high vertical integration. Therefore, PI is ideally situated to offer standard and custom hexapods adapted to the requirements of vacuum applications: from the selection of the right design, suitable drive components, materials, and accessories, to the appropriate manufacturing processes and quality controls
Standard hexapods are available for vacuum surroundings of up to 10-6 hPa. Custom hexapods can even be designed for higher vacuum classes.



Controller, Software, and Integration
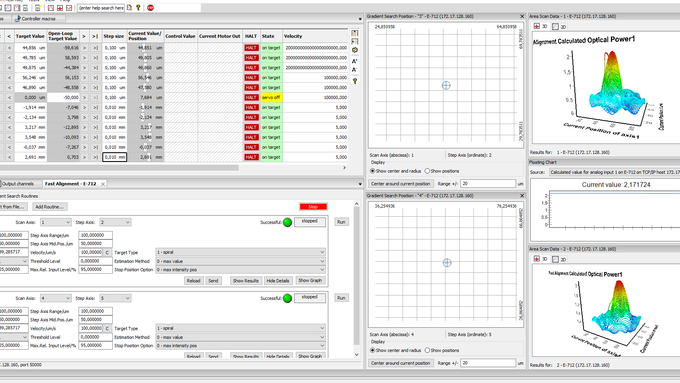
The hexapod controller provides simple and intuitive control of parallel-kinematic 6DoF systems: All target positions can be commanded in Cartesian coordinates. The controller performs the calculations for controlling the individual struts and the resulting desired movement of the platform.
The position and alignment of both the reference coordinate system and the center of rotation can be conveniently defined in the software and adjusted to the application. PI’s universal GUI can be used to control and start up not only all hexapod systems, but also all other PI positioning systems with any drive technology. The PI Software Suite, a comprehensive software package, also offers drivers and libraries for many commonly used programming languages.
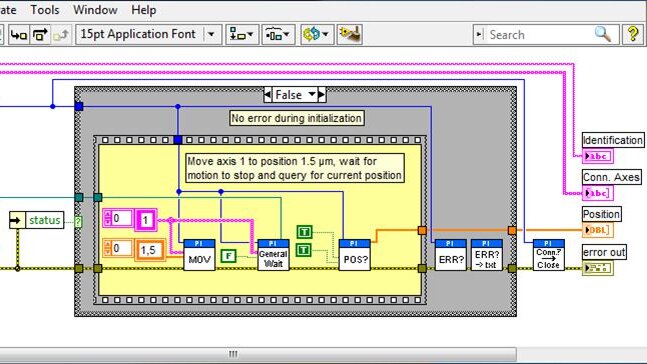
Emulating the controller facilitates integration in the customer’s programming even before deployment of the hexapod. This makes it possible for customers to develop, test, and optimize user programs and to integrate the hexapod in the production environment even before receiving the system.
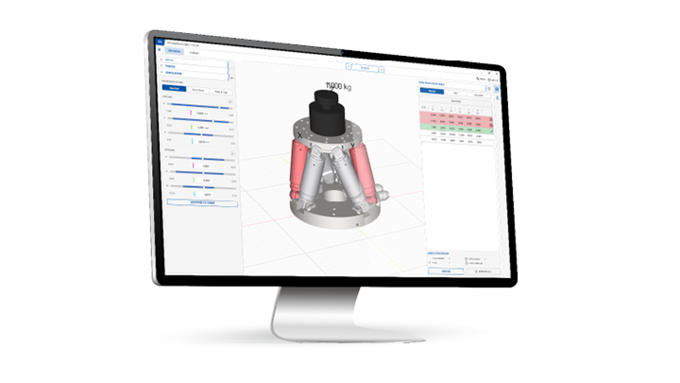
The simulation program for parallel kinematics, which enables the calculation and depiction of the workspace and load situations, can also be used to simplify implementation. An industrial EtherCAT interface is also available as an option for integration in automation processes.