PI pursues a platform- and hardware-independent concept in the design of the motion control software. This approach has proven its worth and is even flexible for future enhancements.

GCS ensures the compatibility between PI positioning systems via standardized sets of human-readable commands. Therefore, starting up and programming becomes much easier: Different positioning systems can be operated together and new systems can be integrated with minimum programming effort.
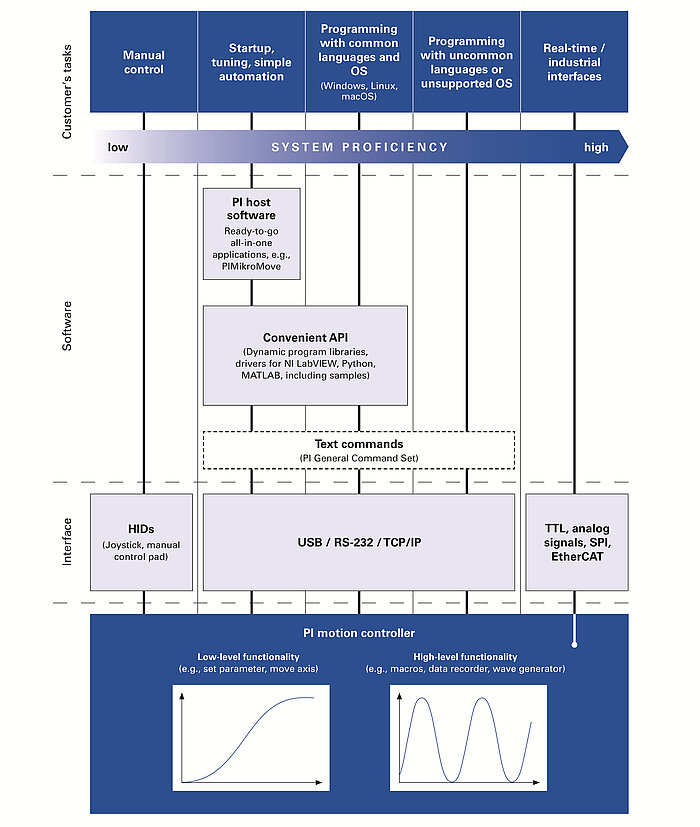
There are different ways of controlling PI controllers:
- The commands can be received via USB, RS-232 or TCP/IP, depending on the controller's specifications
- >> APIs with various librariers and drivers can be used for the automation and integration processes
- >> PIMikroMove® provides a graphical user interface for controlling our controllers; GCS commandos are sent in the background
- From other environments, communication is possible by sending text-based commandos with user-defined implementations
Additional control options:
- Direct interface with a human interface device (HID), such as a joystick or control pad
- Additional interfaces for control, e.g., analog signals, serial peripheral interface (SPI), TTL, or EtherCAT